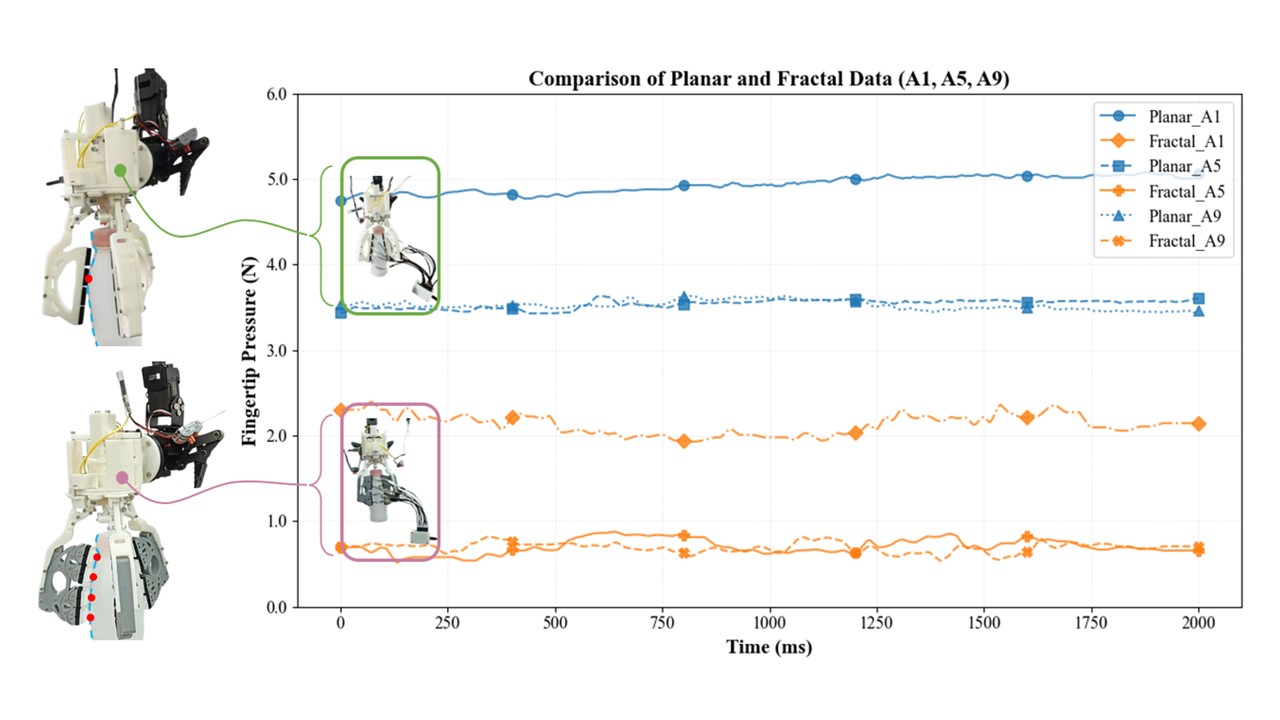
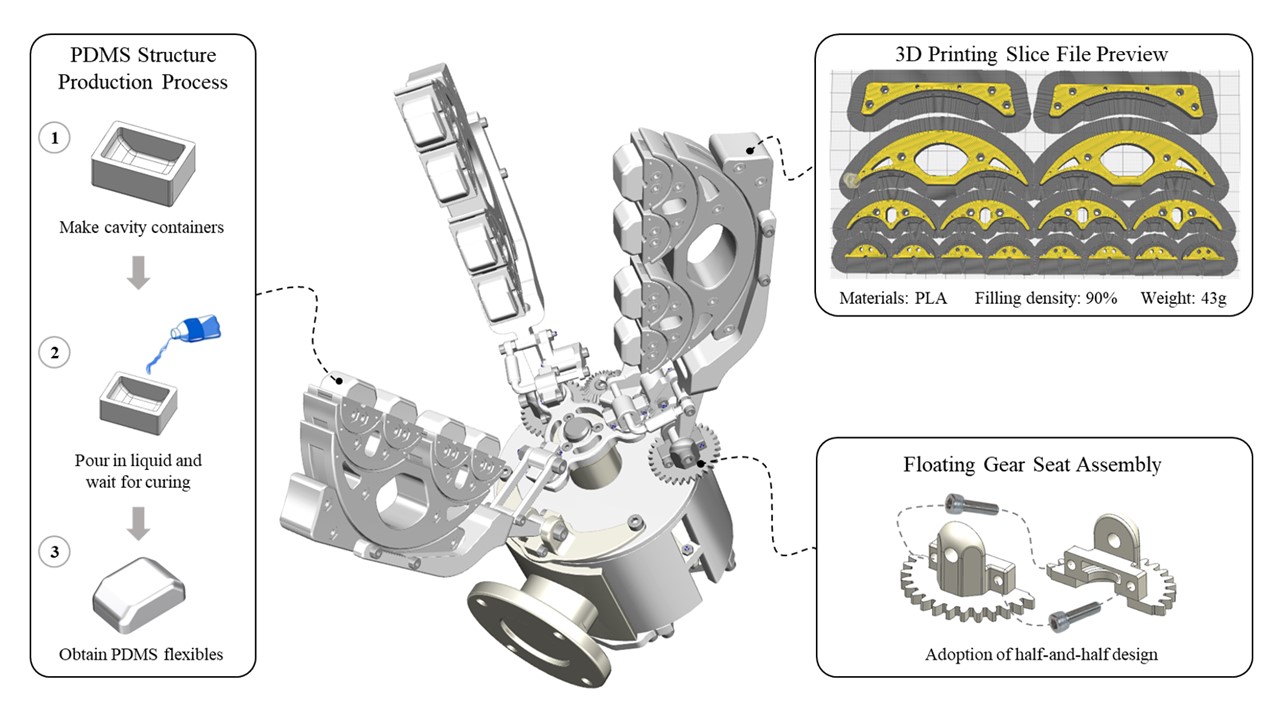
Despite thriving development in academic and practical scenarios, multi-joint underactuated manipulators is still struggling with grasp stability, especially in case of heavy or irregular-shaped objects. A gripper with fractal morphology is invented to improve the grasping capacity of multi-joint underactuated manipulators. Combining the adaptivity of fractal geometry and the principle of lever, the invented fractal gripper achieves superior grasping capacity. The self-recovery feature is realized by resilient design to activate the function of continuous robust grasping and improve the grasping efficiency. Besides, the grasped objects can be held softly owing to the contact force redistribution and pressure re-equilibrium. Meanwhile, the fractal finger is wrapped by elastic polymer to ensure a safe and secure grasp. Fractal gripper with switchable mode promote its applicability. In the fingertip pressure experiments, we tested the fractal gripper and demonstrated its ability to stably envelop complex objects while ensuring even force distribution. Well-designed grab experiments with objects of diverse shapes and sizes demonstrate the multi-scale adaptability and superior grasping stability of the fractal gripper. Our study brings a transformative design paradigm to integrate traditional machine design with mathematical and mechanical principles, which meets critical requirements from a broader field of practical scenarios, such as dealing with irregular heavy objects in everyday housework, agricultural harvesting and underwater operations.